

 QQ
QQ
接触过库卡机器人示教器的人应该知道,库卡机器人有两种可以调节的倍率:
-程序倍率,简称POV;
-手动倍率,简称HOV;
操作方式也有两种:
1.通过触摸屏调节:

通过 +/- 或者拖拉滑条来调节其大小;
2.通过物理按键来调节:

通过 +/- 按键来调节其大小;
二.系统变量
关于倍率,机器人系统都有相应的系统变量对应:

当在机器人示教器上操作时,
(1)手动调节量改变的是:$OV_JOG;
(2)程序调节量改变的是:$OV_PRO;
三.调节增量设置:
默认的情况下,倍率增量:0/1/3/5/../75/100:

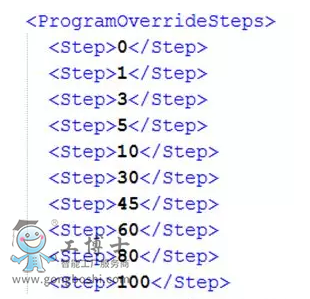

如果觉得默认的配置不好,可以通过修改来实现:
具体修改路径:进去机器人控制器windows系统:C:\KRC\USER,打开文件:SmartHMI.User.config,在里面找到ProgramOverrideStep进行修改;
在里面找到JogOverrideStep进行修改;
修改完成后,记得关机冷启动来刷新。
本文摘自:网络 日期:2023-05-23
详情点击:库卡机器人官网
电联:156 0178 5639
详情点击:库卡机器人官网
电联:156 0178 5639
